Descripción del proyecto
A16 Rotterdam: una autopista nacional de 11 kilómetros de longitud entre la A16/A20 en Terbregseplein y la A13 en el aeropuerto de The Hague en Rotterdam. Con muros de tierra, un túnel semihundido que atraviesa el lago Bergse Bos, pantallas acústicas y un asfalto que amortigua el ruido, la A16 Rotterdam, de energía neutra, será una de las autopistas mejor integradas de los Países Bajos.
TWIN16
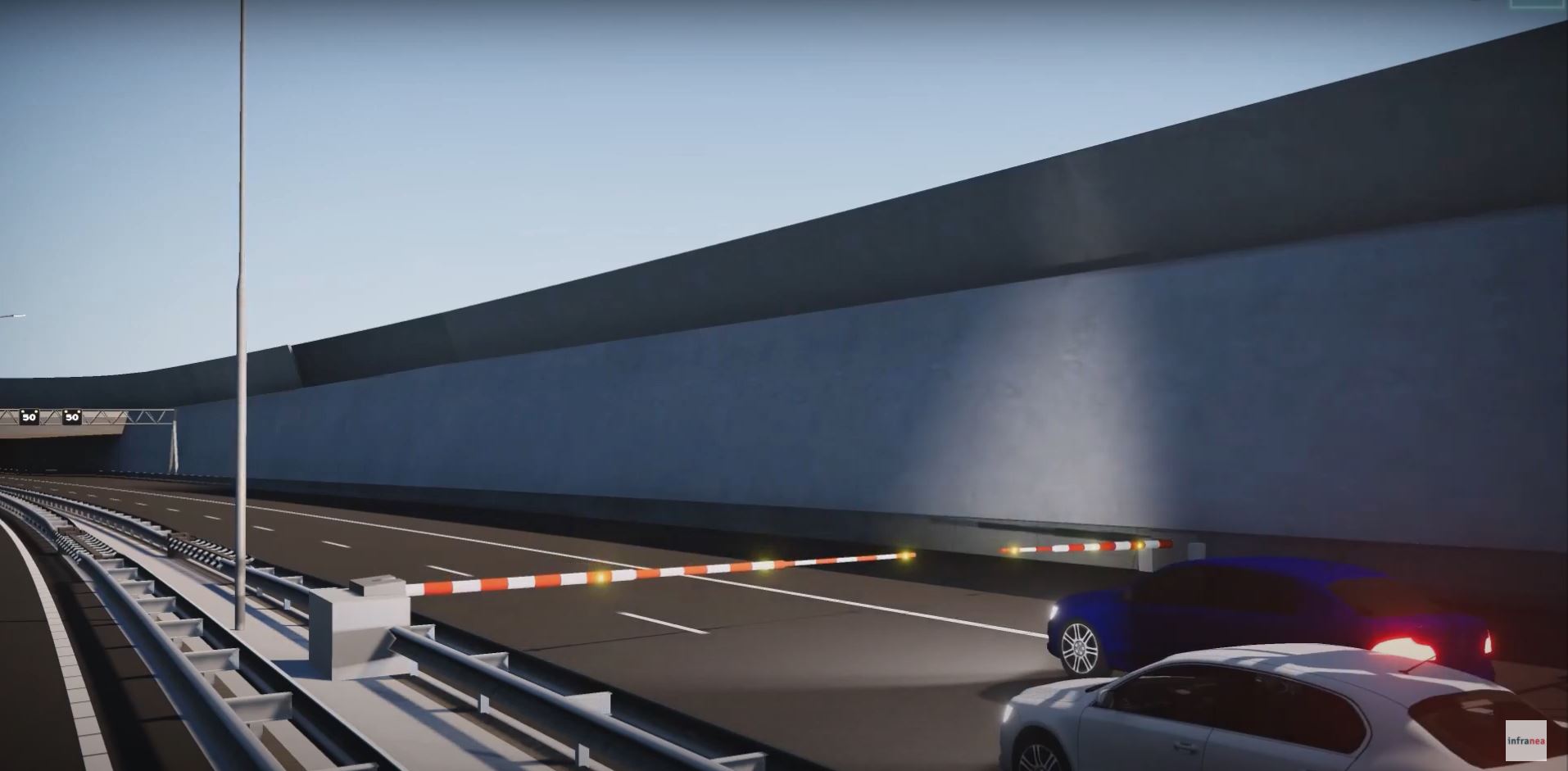
De Groene Boog encargó a Infranea la creación del llamado TWIN16, el gemelo digital de todo el trazado, incluido el túnel. Un entorno de Realidad Virtual (RV) fue la base de TWIN16, que se creó íntegramente con un diseño en 3D y modelos BIM. Este entorno de RV se mantuvo actualizado durante todas las fases del proyecto para que siempre estuviera disponible la versión más actual.
Testeo virtual
El TWIN16 se utilizó para verificar y probar los planes licitación económicamente más ventajosa durante la fase de diseño preliminar. Y también fue utilizado por los operadores y otras partes interesadas para validar los procesos de los usuarios de acuerdo con la Norma Nacional del Túnel (LTS). Posteriormente, en la fase de diseño detallado, se siguió elaborando el comportamiento virtual en TWIN16 y se estableció un vínculo con el software real para el control operativo del túnel. Esta fue la base para iniciar las «pruebas virtuales». El enlace se utilizó en fases posteriores para realizar todas las pruebas del sistema. El resultado fue una reducción de los costes de los fallos y una mayor calidad del software.
Formación, entrenamiento y práctica
TWIN16 servirá como sistema para proporcionar a los operadores y otras partes interesadas formación, entrenamiento y práctica.
Validación del sistema de cámaras CCTV
El entorno también se utiliza para determinar todos los ajustes de los componentes de la instalación sin necesidad del entorno físico real (túnel). Esto incluye las posiciones y los ajustes preestablecidos de todas las cámaras de CCTV dentro y cerca del túnel. Infranea proporcionó una solución de diseño dinámica y paramétrica basada en TWIN16 más el diseño 3D y los modelos BIM. Esto nos permite capturar las posiciones de las cámaras de CCTV de forma consistente en todas las herramientas de diseño y verificar las distancias y ángulos de visión desde el principio dentro de TWIN16. De este modo, pudimos introducir en el proyecto un proceso de «First Time Right».
TWIN16 también se utilizó como base para el videojuego de simulación de conducción de la A16 que puede experimentarse en la Expo A16 de Rotterdam, el centro de experiencias interactivas de este proyecto. Para más información, consulte: A16 Simulación de conducción.